Lo que vestimos y las tendencias de la moda no solo cambian de una temporada a otra, sino de la mañana a la noche, de un día de sol a uno nublado, del sábado por la mañana al sábado por la noche. Nuestra manera de vestir responde al clima, al calendario laboral o a los eventos más importantes de la ciudad. Sin embargo las propuestas del escaparate no se adaptan a tiempo real a lo que ocurre en el entorno.
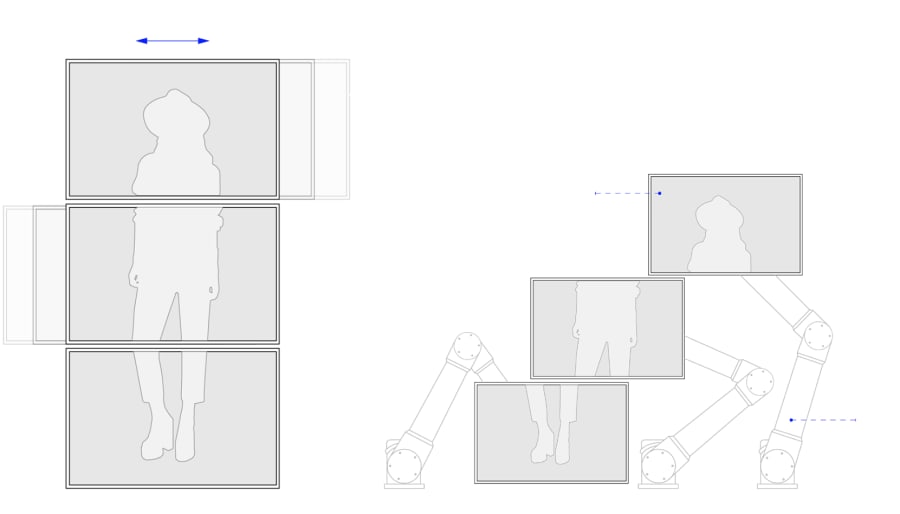
¿Y si dotamos al escaparate de la sensibilidad para conocer el clima y la inteligencia para cruzar esos datos con el calendario y los eventos de una ciudad? En este proyecto hemos creado el primer escaparate reactivo, sensible a su entorno y que es capaz de adaptarse al ritmo de la vida de la ciudad.
---
Fashion trends not only change from one season to another, but from morning to night, from a sunny day to a cloudy one, from Saturday morning to Saturday night. Our way of dressing responds to the weather, the work calendar or the most important events in the city. However, the showcase proposals do not adapt in real time to what happens in the environment.
And if we provide the showcase with the sensitivity to adapt to its environment? In this project we have created the first reactive showcase, sensitive to its surroundings and capable of adapting to the rhythm of city life.


Cómo funciona
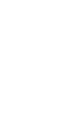
Todo el sistema está controlado por un software personalizado, programado en Openframeworks y Python, que unifica las coreografías de los robots con el contenido de las pantallas, el sonido y las luces. Para la instalación utilizamos cuadro unidades UR5 de Universal robots. El renderizado de contenidos se realiza a tiempo real, tanto en 2D como en 3D, de tal manera que la posición y velocidad de los robots influye en el contenido.
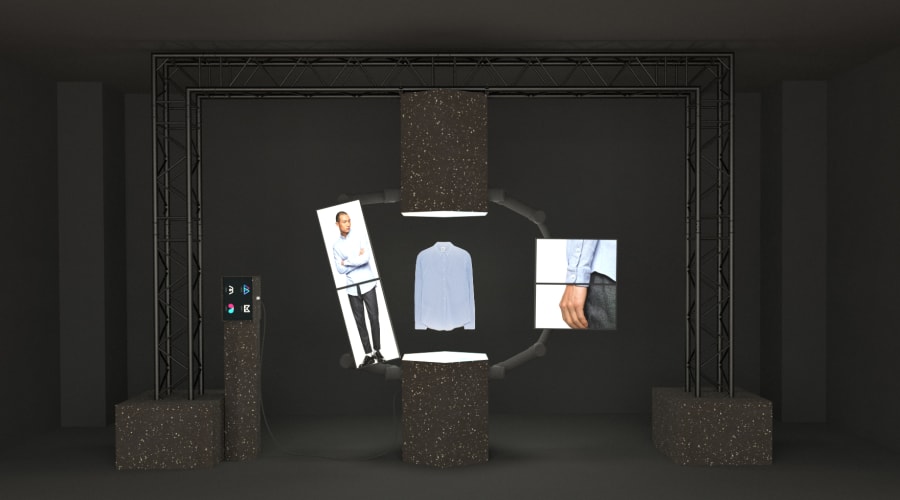
Nuestro software permite multiples modos de programación de robots tanto en cinemática directa como inversa, desde el mondo más sencillo mediante keyframes hasta el modo interactivo mediante sensores a tiempo real.
----
How it works
The entire system is controlled by a custom software, programmed in Openframeworks and Python, that unifies the choreographies of the robots with the content of the screens, the sound and the lights. For the installation we use UR5 units of Universal robots. The rendering of content is done in real time, both in 2D and 3D, in such a way that the position and speed of the robots influence the content.
Our software allows multiple robot programming modes in both direct and reverse kinematics, from the simplest mode through keyframes to the real-time interactive mode using sensors,






----
* Este proyecto es un prototipo real funcional. Este proyecto no ha sido implementado comercialmente aun.
* This protect is a real functional prototype. This project has not been commercially implemented yet.
Robot vendor: Universal Robots
Art direction : Juan Soriano
Graphic Design : Carlos Blastto
Design & Production: Espadaysantacruz Studio
Powered by: Openframeworks & Python
July - 2019